
Bilal Ahmed, an IFRoS student from the 2024-2026 promotion, recently participated in the RAMI 2025 International Underwater Robotics Competition, held at the NATO Centre for Maritime Research and Experimentation (CMRE). Leveraging the skills gained during his IFRoS Master's studies, Bilal and his team designed and built an Autonomous Underwater Vehicle (AUV), with Bilal making significant contributions to its navigation, perception, and object detection systems. Read about his transformative experience and his team's award-winning work below.
“Over the past four months I have been working on an Autonomous Underwater Vehicle (AUV) designed to inspect and navigate autonomously for the RAMI 2025 International Underwater Robotics Competition.

Collaborating with an amazing team including Thi Tran, Taqi Hamoda, Mazen Elgabalawy, DEBORAH DANJUMA and Adel Saidani and special mentions to our mentors Alaaeddine EL Masri El Chaarani, Sebastian Realpe Rua and Roger Pi Roig. It was unforgettable journey, and I'm proud to showcase our collective efforts!
Our AUV and its algorithms were crafted to tackle the challenges of the RAMI 2025 competition. My contributions focused on three key areas:
- Navigation of the AUV: Navigation is critical for any robot, especially underwater. I worked on motion models like constant velocity, input displacement and absolute motion model and test them on the real robot,after that i have implemented an Extended Kalman Filter with sonar updates for state estimation. This experience deepened my understanding of designing Kalman filters and working with imaging sonar and Doppler Velocity Logs (DVL). I also developed the custom initialization of the filter based on the selected origin the algorithm was designed for the structured enviroment which have line features and based on the voting by each beam of the sonar we can estimate the initial position of the robot and initialize the filter.
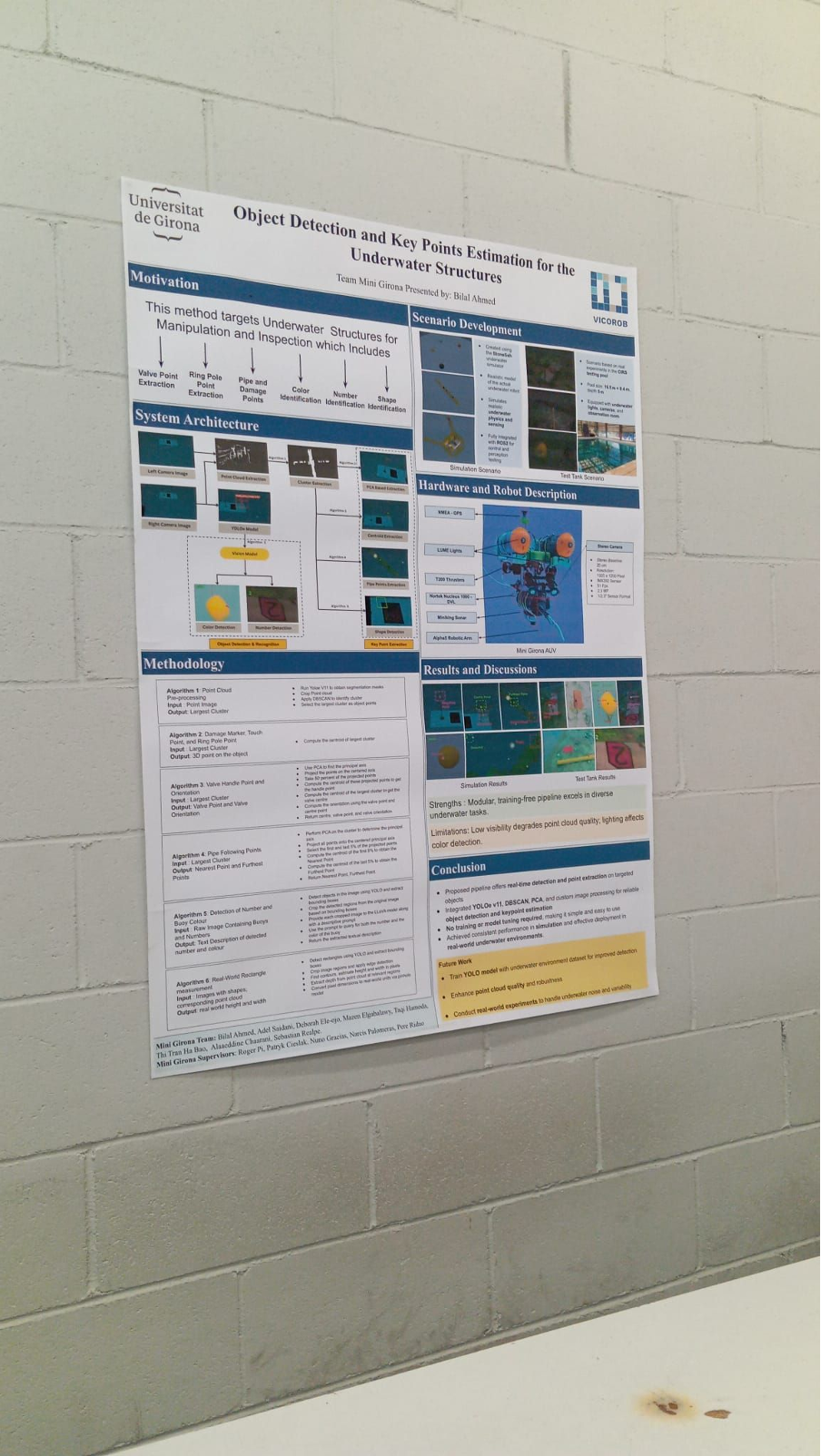
- Object Detection, Recognization and Key feature Extraction : For the competition, our AUV needed to detect objects like buoys and numbers, identifying their colors and labels. We leveraged a large language vision model for accuracy and used stereo cameras to generate point clouds for key feature extraction. My work included identifying intervention points for tasks like grasping ring poles, touching damage markers, and pipe following. I also contributed to reporting geolocalized object positions. This experience helped me to learn about different techniques in the computer vision.
- Scientific Poster Competition: I designed a poster and authored a paper detailing our perception work. Although I couldn’t attend the competition due to unforeseen reasons, my teammate Taqi Hamoda presented our poster, and we proudly won the poster competition!
This project was a transformative learning experience, enhancing my skills in robotics, Kalman filters, dimension reduction algorithms, and critical problem-solving. I’m deeply grateful to our professors Narcis Palomeras, Nuno Gracias, Patryk Cieślak, and Pere Ridao for their mentorship , IFRoS Master for this incredible opportunity, and NATO Centre for Maritime Research and Experimentation (CMRE) for providing the platform. A special shoutout to Imma Güell for her unwavering support throughout!