
We're thrilled to announce that our student, Ivan David Changoluisa Caiza, has had their paper accepted for presentation at the 2024 IEEE International Conference on Robotics and Automation (ICRA) The conference will be held from May 13th to 17th, 2024, in Yokohama, Japan. This paper is a joint work between Centro Avanzado de Tecnologías Aeroespaciales (CATEC) and the Laboratory for Robotics and Intelligent Control Systems (LARICS), as a part of the Ivan’s master thesis project. ICRA is a top conference in robotics, and it's an honor to have their work selected. Huge congratulations to this team for their achievement! Their research will undoubtedly contribute to the advancement of the IFROS Master's program.
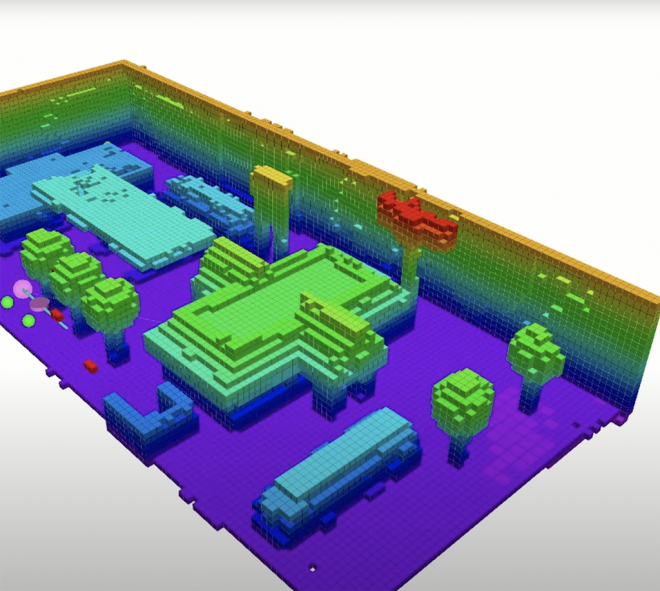
Changoluisa's paper, titled "Autonomous Exploration of Unknown 3D Environments Using a Frontier-Based Collector Strategy," is the culmination of their Master's thesis research. The paper proposes a novel approach for autonomously exploring unknown 3D environments using a frontier-based collector strategy. This strategy utilizes a frontier planner to generate a sequence of waypoints guiding the robot towards unexplored areas. A collector strategy then gathers data from the environment as the robot navigates these waypoints.
Changoluisa recently graduated from the Erasmus Mundus Intelligent Field Robotic Systems master program. Currently, he works as a Drone Trainer at HEXO Drone School in Ecuador. In this role, Changoluisa provides training services for Unmanned Aircraft System (UAS) operations in surveying, monitoring, and rescue applications. He has even had the opportunity to train his country's military and fire brigade!
"Working at HEXO Drone School allows me to apply the skills and knowledge I gained in the IFROS master program," Changoluisa shared. "I'm grateful for the chance to have collaborated with such a talented group of researchers and excited to continue my work in the field of robotics."